Par
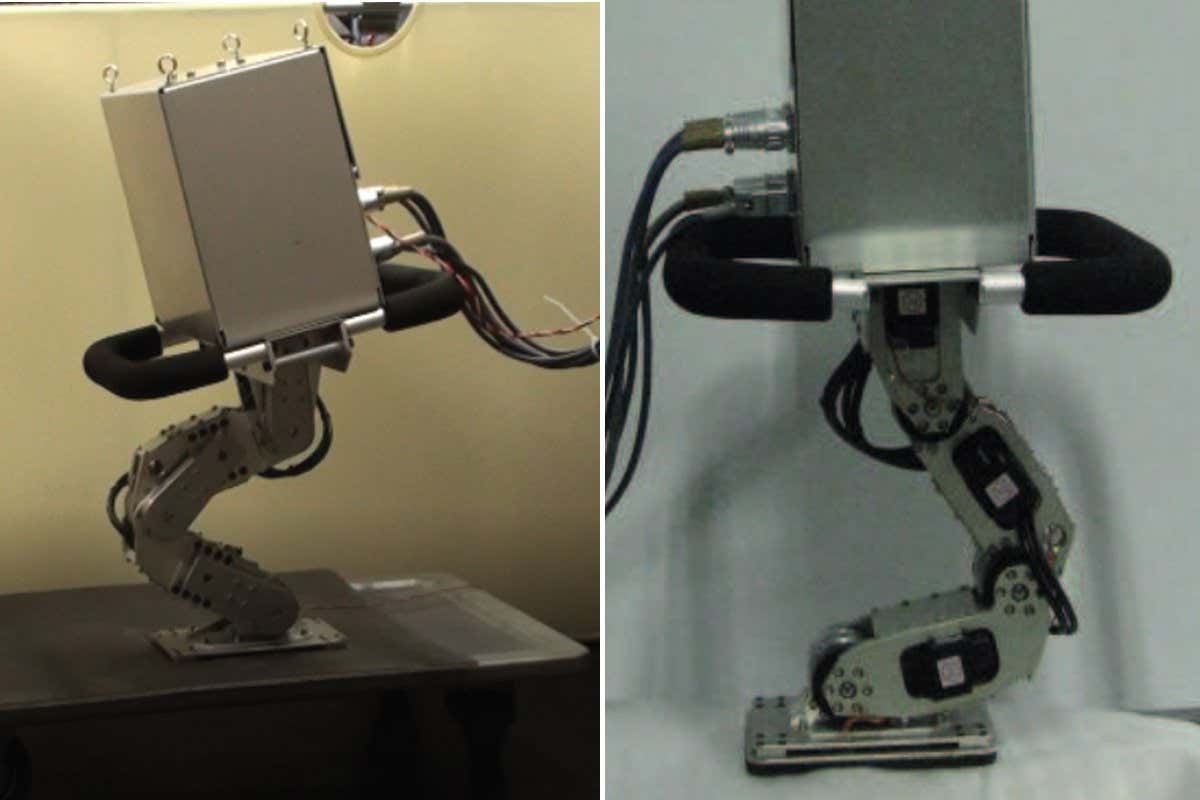
Un robot unijambiste qui peut se tenir debout, sauter et garder son équilibre sur des surfaces en pente ou instables pourrait offrir un itinéraire moins cher pour robots bipèdes et auto-équilibré exosquelettes. Des chercheurs du Toyota Technological Institute (TTI) de Nagoya, au Japon, ont construit leur robot, baptisé TTI Hopper, en utilisant des moteurs et des engrenages simples pour moins de 1000 $, puis ont créé un algorithme qui compense les capacités limitées de ces composants.
«En robotique, nous utilisons parfois l’hydraulique, car elle peut être actionnée rapidement», explique Barkan Uğurlu, qui est maintenant à l’Université Özyeğin d’Istanbul, en Turquie. « Ou des actionneurs électriques dotés d’un ressort spécial ou d’une jauge de contrainte pour mesurer les forces à l’intérieur. Au lieu de cela, nous avons utilisé des moteurs à courant continu avec des engrenages. Nous ne mesurons que l’angle de l’articulation, et nous n’avons utilisé qu’un seul capteur de force très économique au pied.
L’algorithme fait céder les articulations lorsque les chocs doivent être absorbés et les raidit lorsque le robot doit se redresser ou pousser en courant, lui permettant de rester debout même dans des circonstances difficiles, comme une surface inclinée qui va soudainement à horizontal.
La « capacité d’adaptation au terrain » qui en résulte n’est pas nouvelle, dit Uğurlu, mais lui et ses collègues ont réussi à prouver mathématiquement que leur algorithme garantissait la stabilité du robot, compte tenu de la pente et du mouvement de la surface au cours de leurs expériences. Ils l’ont fait en calculant les forces verticales et horizontales des moteurs et de la gravité que l’algorithme générerait sur la jambe. Par exemple, ils ont découvert que le robot devrait rester stable jusqu’à une pente de 9 degrés.
« Si vous affaiblissez la jambe, par exemple, elle se met à vibrer, même s’il n’y a pas de perturbation », explique Uğurlu. « Nous savons depuis le début quels sont les paramètres de sécurité. »
Uğurlu travaille maintenant sur l’utilisation de l’algorithme dans un exosquelette bipède pour les personnes qui ont perdu l’usage de leurs jambes. « Les exosquelettes disponibles dans le commerce n’ont pas de capacités d’auto-équilibrage », dit-il. «Ils bougent les jambes, mais pour l’équilibre, le patient doit engager le haut de son corps, avec des béquilles. Mon idée est d’utiliser la capacité d’adaptation au terrain pour me débarrasser des béquilles.
Référence de la revue : Robots autonomes, DOI : 10.1007/s10514-021-10010-z
Plus sur ces sujets :
Source link